Automação da abertura de portas com Arduino
Como funciona:
O sensor ultrasonico verifica a distancia de uma pessoa até a porta ou portão, se essa distancia for igual a um determinado valor o servo motor é acionado fazendo com que a porta se abra e logo após liga o led, então espera-se um determinado tempo para que a pessoa possa entrar ou sair do ambiente e novamente é verificado a distancia, caso a distancia seja maior que o valor estipulado o servo motor é acionado novamente fechando a porta e o led (luz) apaga.
Descrição de cada componente:
Servo motor

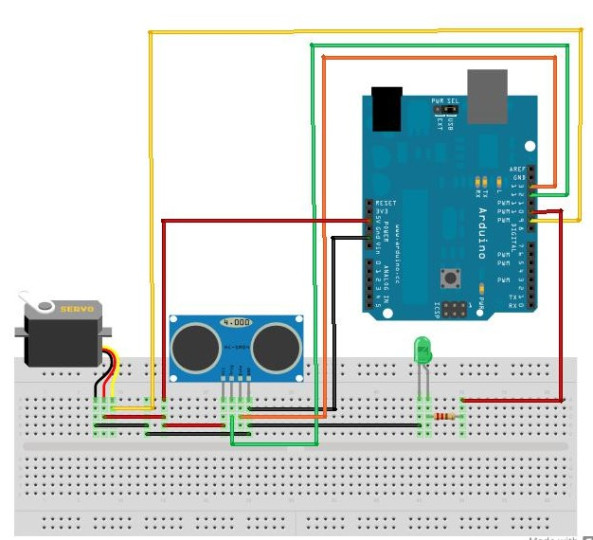
O servo motor ultiliza de 3 fios: um de cor preta, designado para o terra que deve ser ligado ao pino terra do arduino (GND). Um fio vermelho designado para a corrente que deve ser ligado ao pino 5 volts do arduino. E um fio amarelo designado aos dados que deve ser ligado ao pino digital 9 do arduino.
Sensor Ultrassônico
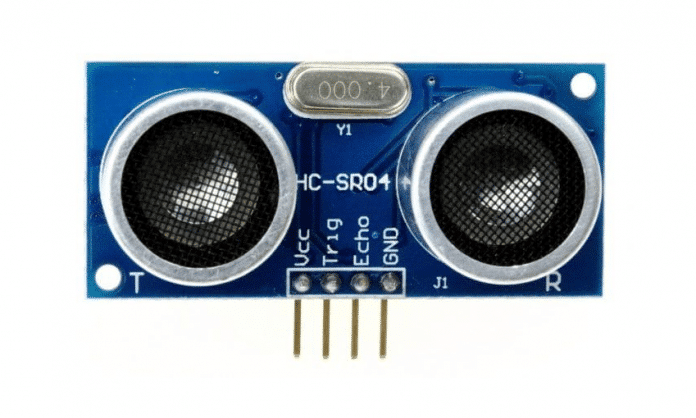
O sensor ultrassônico é composto 4 pinos: VCC, Trig, Echo e GND. O pino VCC deve ser ligado ao pino 5 volt do arduino. O pino Trig deve ser ligado ao pino digital 12 do arduino. O pino Echo deve ser ligado ao pino digital 13 do arduino. O pino GND deve ser ligado ao pino terra do arduino.
LED

O led tem dois pinos onde um é maior que o outro. O pino maior, designado para a corrente é ligado a um resistor com o objetivo de regular a tensão que vem do pino digital 10 do arduino. O pino menor (terra) é ligado ao GND (terra) do arduino.
Código
Servo servo_objeto;
Ultrasonic ultrasonic(12,13);
int posicao_inicial_servo = 0;
int ledPin = 10;
void setup()
{
Serial.begin(9600);
pinMode(echoPin, INPUT);
pinMode(trigPin, OUTPUT);
pinMode(ledPin, OUTPUT);
servo_objeto.attach(9);
}
void loop()
{
digitalWrite(ledPin, LOW);
servo_objeto.write(posicao_inicial_servo);
int valor = func_distancia_ultrasonico();
if(valor <=15)
{
func_controladora();
delay(5000);
}
delay(500);
}
void func_controladora()
{
func_liga_led();
func_chama_servo();
}
void func_liga_led()
{
digitalWrite(ledPin, HIGH);
}
void func_chama_servo()
{
int posicao_final_servo = 90;
servo_objeto.write(posicao_final_servo);
}
int func_distancia_ultrasonico()
{
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
int distancia = (ultrasonic.Ranging(CM));
Serial.print("Distancia em CM: ");
Serial.println(distancia);
return distancia;
}